
– L’impression 3D –
J’ai écrit plusieurs billets sur la tortue de sol et les intéressantes hypothèses pédagogiques qui l’accompagnait. Ce billet n’a pas d’autre vocation que de vous amener à construire vous-même une de ces tortues avec une imprimante 3D et quelques composants Arduino standards. J’ai aussi fait le choix de construire une tortue sans soudure. Il s’agit de ne pas effrayer le novice en lui montrant que la tortue peut être construite sans maitriser la totalité des techniques de l’électronicien.
Le concept
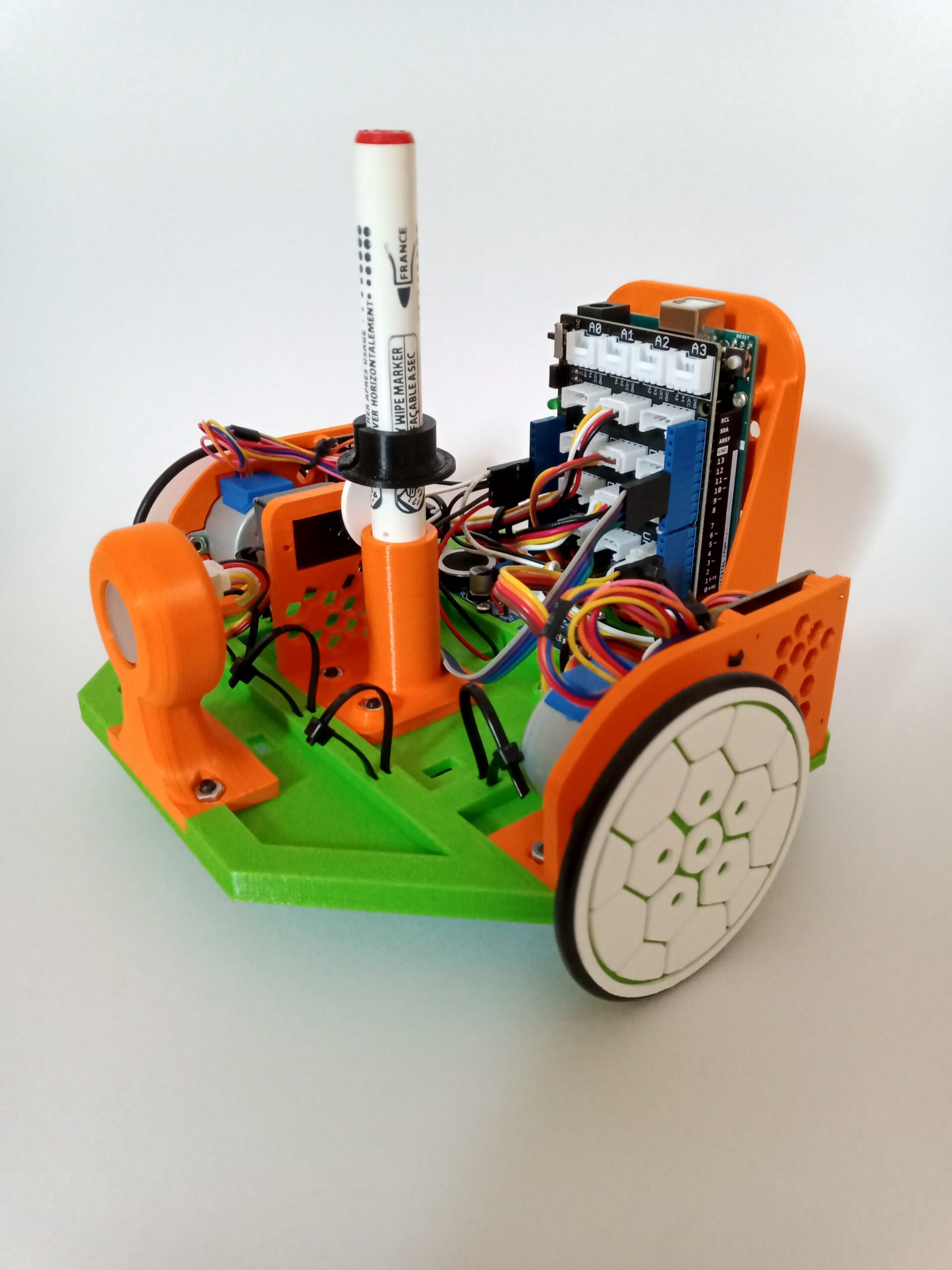
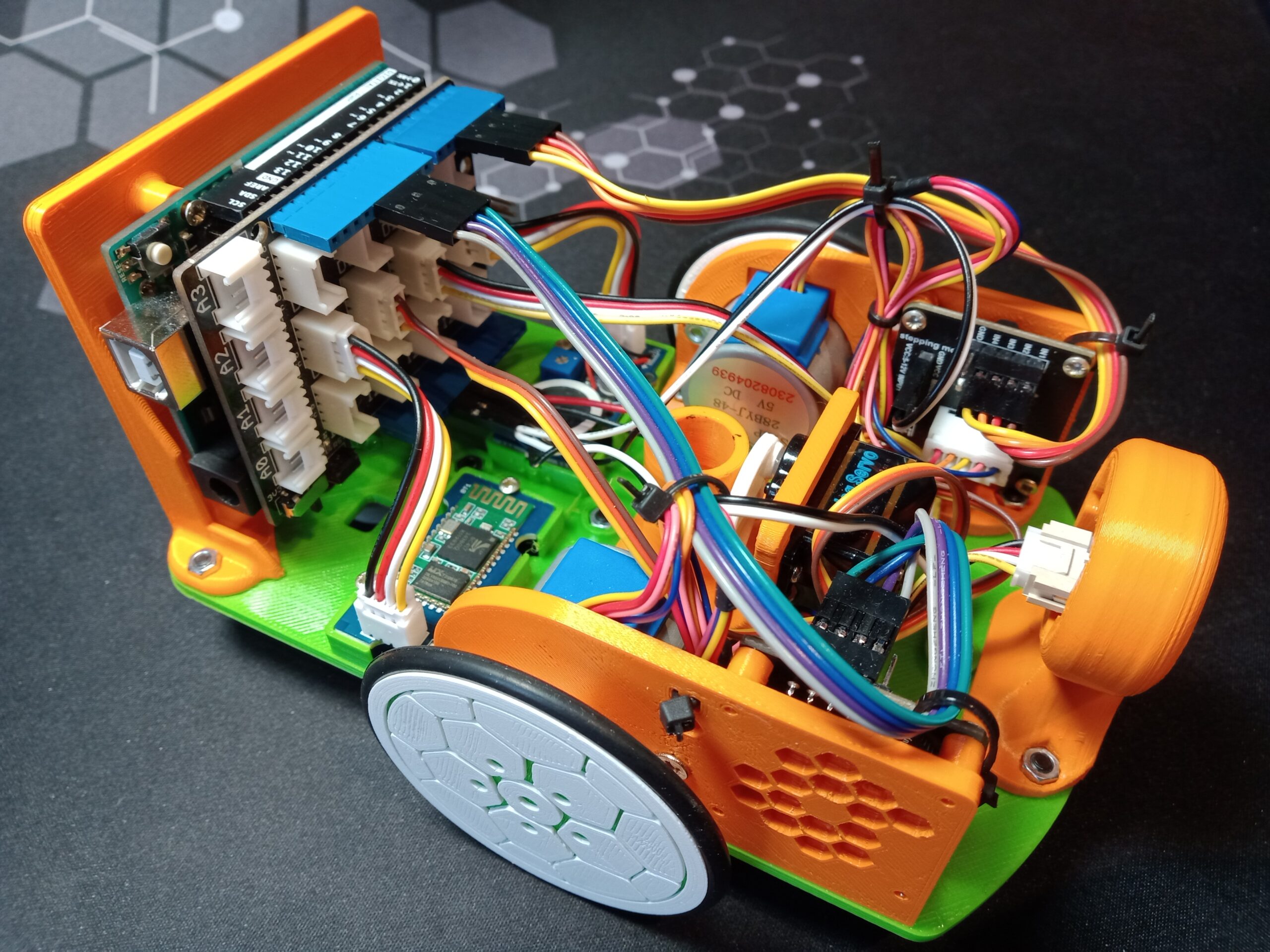
La tortue de sol appartient à une catégorie particulière de robots, les robots de géométrie. Leur conception repose principalement sur le fait qu’elles disposent d’un moyen de traçage escamotable (stylo) situé sur le centre de rotation du robot. La précision de déplacement est assurée par des moteurs pas à pas.
La tortue présentée est relativement précise. Cette précision pourrait encore être améliorée en utilisant des moteurs plus onéreux, des matériaux, plus stables que le PLA et des procédés de fabrication plus précis que l’impression 3D grand public. Cependant, j’ai fait le choix de préférer la démocratisation de la fabrication à la précision.
Si les tortues de sol semblent être passées de mode au profit du « tout écran », cet abandon semble difficile à justifier par des raisons pédagogiques (voir La tortue qui devint chat… et pas forcément pour le mieux).
L’idée maitresse est de réaliser une tortue programmable avec une série de cartes perforées (voir ce billet).
Les fichiers STL pour imprimer les tortues sont sur Cults et peuvent être obtenus en cliquant sur les tortues ci-dessous.
 |  |
| Tortue large | Tortue étroite |
L’impression 3D
Les impressions ont été réalisées sur une imprimante delta lors d’une animation durant laquelle la société Dagoma a prêté une imprimante sigma.

Le plateau de 16 cm de largeur a été imprimé avec une épaisseur de couche de 0.15mm et un filament Chromatik orange. Il s’agit de la pièce la plus longue à imprimer (environ 10h). Pour éviter le gauchissement, qui est courant sur des pièces plates de cette taille, j’ai utilisé de la laque anti-warping sur le plateau.
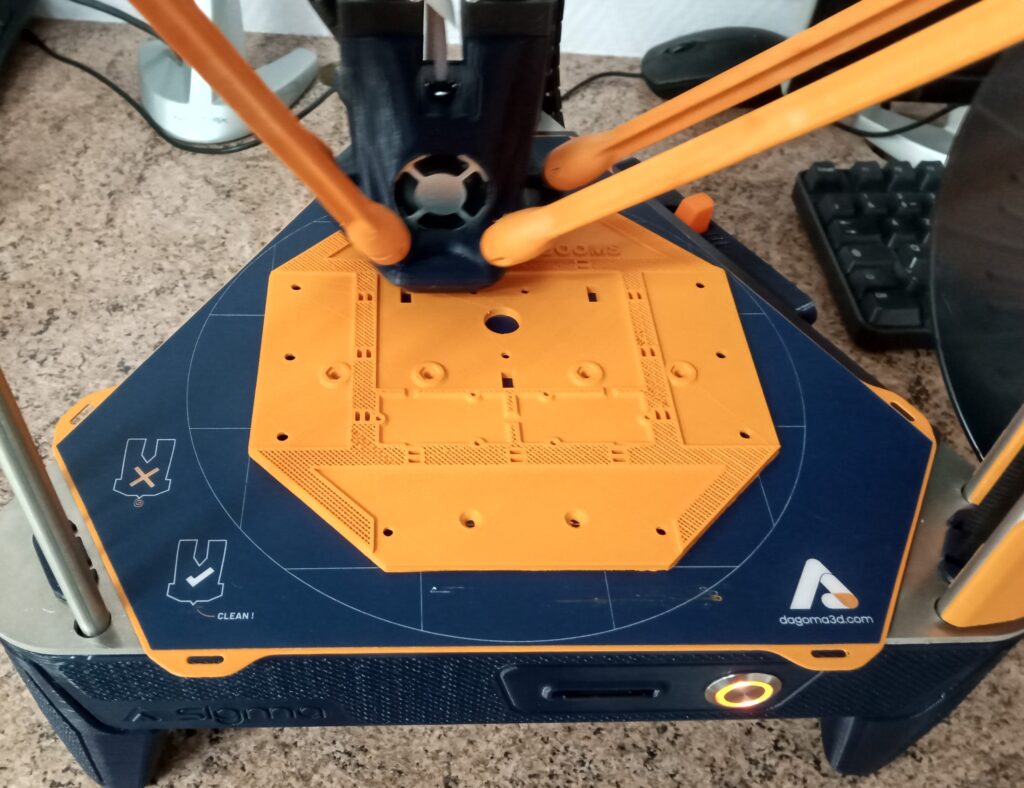
Impression du plateau
Avec les temps de pause programmables dans le slicer, il est également possible d’imprimer des pièces avec des couches multicolores. Comme un des projets en cours sur ce robot concerne des enfants de CP-CE1, dont l’orientation spatiale peut encore être fragile, j’ai choisi de différencier les deux roues du robot par des couleurs différentes (évidemment vous pouvez concevoir des roues G et D):

Le motif écaille de tortue est un hommage aux tortues de sol qui ont précédé celle-ci.
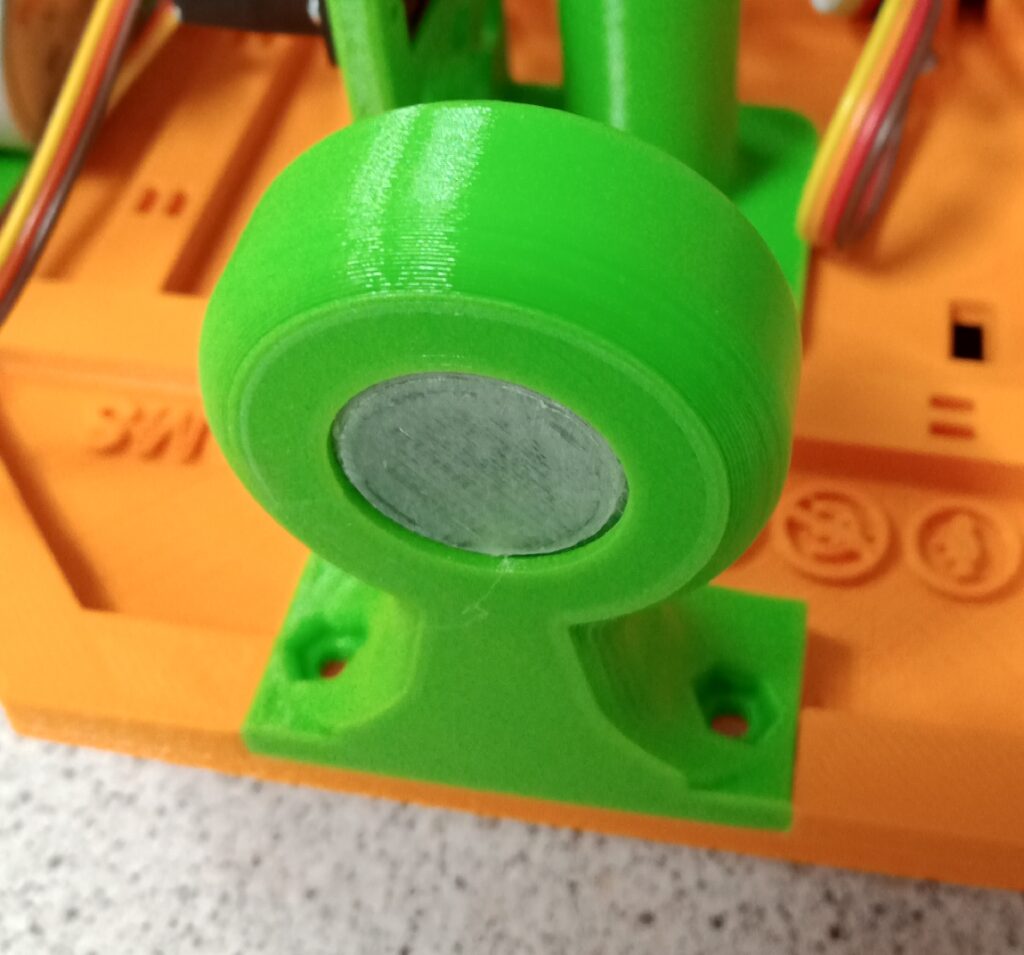
L’impression du phare se déroule en deux parties. Un « verre dépoli » est imprimé en PLA translucide.
Il est ensuite passé au papier de verre fin (300 ou 500).Puis, il est déposé dans le phare en cours d’impression, lors d’une pause programmée dans le slicer.
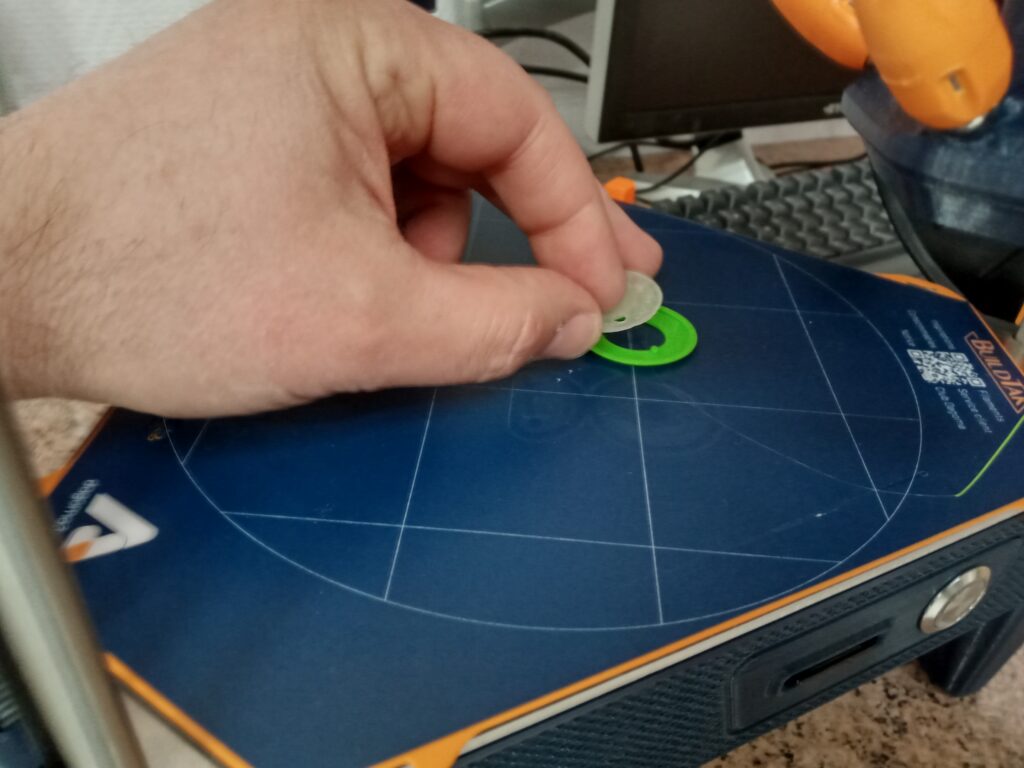
La suite de l’impression sertira le « verre dépoli » dans le phare.
Dans un prochain billet, je vous expliquerais comment monter les composants électroniques sur les pièces imprimées.