
– Monter les composants –
Dans ce second billet, je vais vous expliquer comment monter la tortue de sol à partir des pièces imprimées en 3D (voir le billet précédent). Avant tout, il faut, en plus des pièces imprimées, posséder les composants suivants:
| COMPOSANTS ARDUINO ET GROVE SEEED | CÂBLAGE SANS SOUDURE |
| Arduino Uno A000066 | 10 câbles M/F 150 mm 4576 |
| Module Grove Base Shield 103030000 | 25 boîtiers NSR-04 |
| Moteur pas-à-pas + driver STP01 (x2) | 25 boîtiers NSR-02 |
| Servomoteur Grove 316010005 | 25 boîtiers NSR-01 |
| Module à LED RGB Grove 104020169 | 25 contacts femelles NDR-T (pour boîtier NSR) |
| Module Bluetooth Grove 113020008 | 25 contacts mâles NDR-TM |
| Module HP Grove 107020001 | QUINCALLERIE |
| ALIMENTATION | Boulons (vis acier tête fraisée M3 x10; écrous M3) |
| Coupleur 3 piles LR6 EM3P (x2) | Fixation des roues (4 boulons ) vis acier tête fraisée M2.5 x 8; écrou M2,5 |
| Connecteur pro 9V en I | vis à bois 2mm x 10mm |
Ces composants sont choisis pour ne pas avoir de soudure à faire dans le cadre d’un travail scolaire. Vous pouvez bien entendu souder certains composants pour réaliser quelque économie. J’ai acheté l’ensemble des composants auprès de la société Go Tronic. Le montage suivant ne demande aucune expérience réelle d’électronicien, seulement un peu de minutie et de la patience.
L’électronique et les pièces imprimées
Les composants sont fixés sur les parties imprimées du robot par des vis à bois de 2mm x 10mm ou des boulons M3.
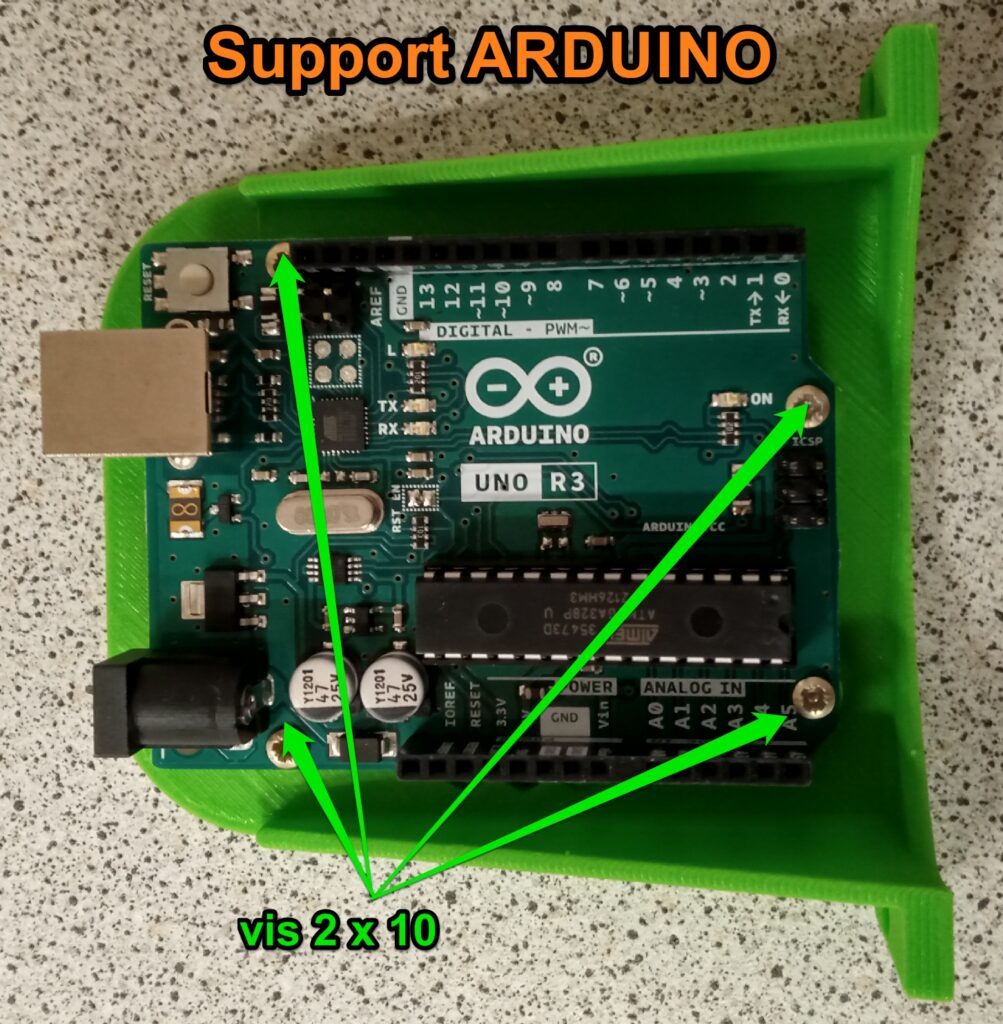
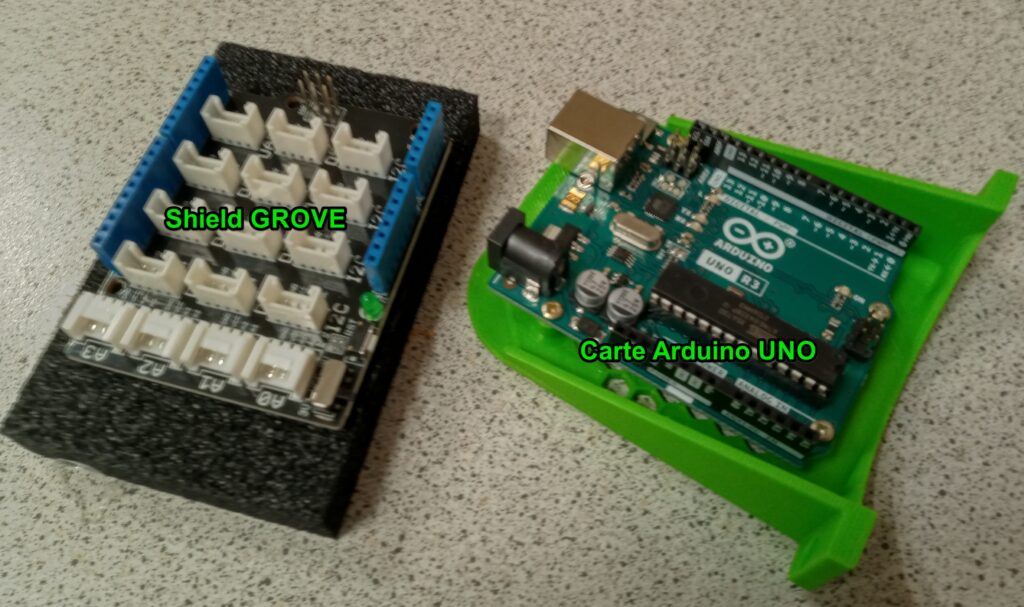
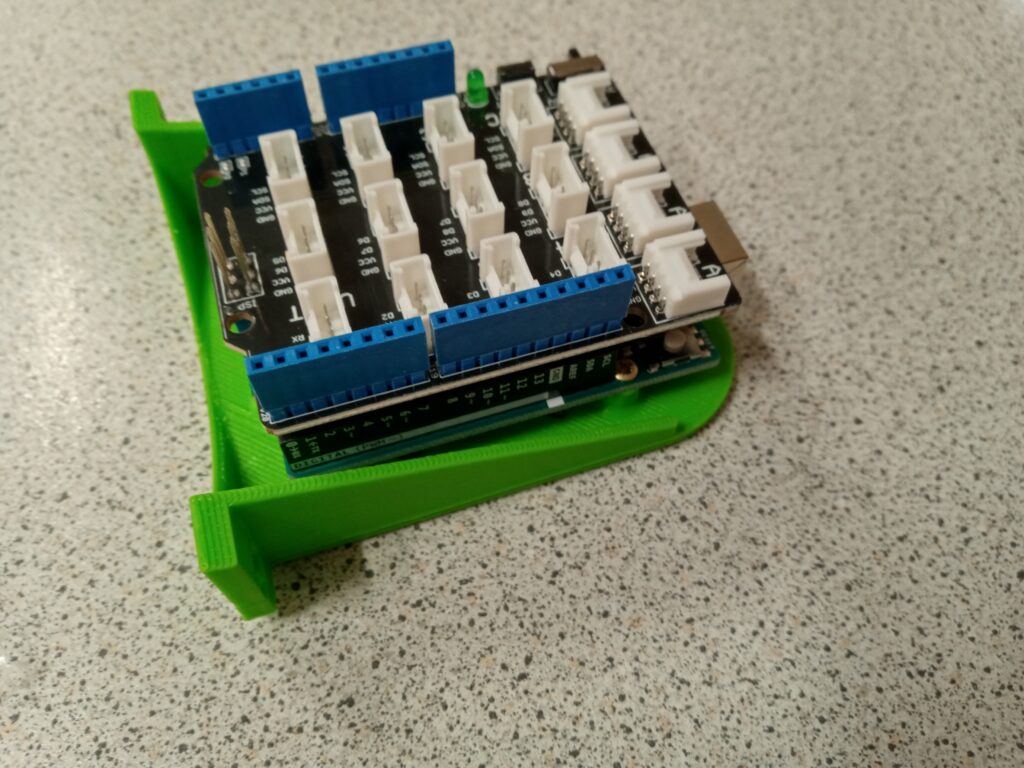
Une fois la carte Arduino montée, n’oubliez pas d’insérer le Shield GROVE.
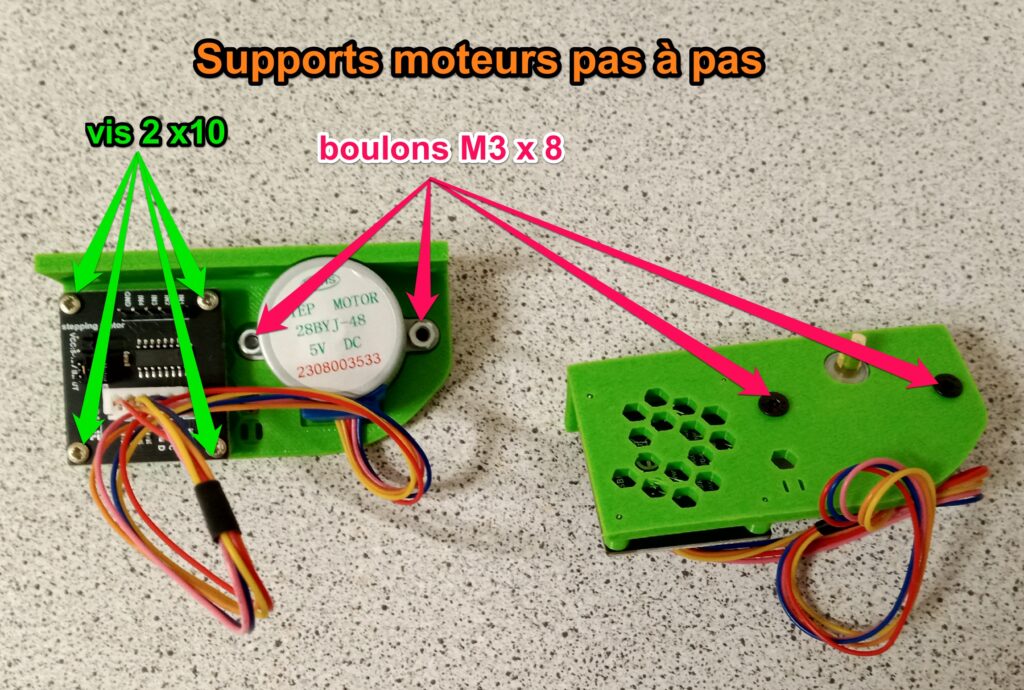
Les moteurs pas à pas sont fixés avec des boulons M3x8mm et le circuit imprimé est fixé avec des vis à bois de 2mmx10mm.
La LED RGB est montée avec des vis à bois 2mmx10mm.

Le servomoteur peut être monté sur le support avec les vis de fixations fournies dans le kit.

Maintenant que les principaux composants sont assemblés, nous allons alimenter notre carte Arduino.
L’alimentation de la carte Arduino
Nous avons fait le choix d’alimenter la carte avec deux coupleurs de 3 piles, soit 6 piles AAA. L’alimentation par pile ne présente qu’un intérêt limité, car si nous atteignons bien 9V, la durée de vie d’une pile sur ce genre de montage fait rapidement préférer une alimentation par batterie. La tension n’est plus que de 7.2V, mais elle se situe dans la plage 7-12V préconisée.
Vous pouvez bien évidemment trouver un système d’alimentation plus performant ou mieux conçu que celui proposé, mais les contraintes imposées par l’idée d’un robot « sans soudure » limitent fortement les solutions retenues, surtout si on cherche à limiter également le coût.
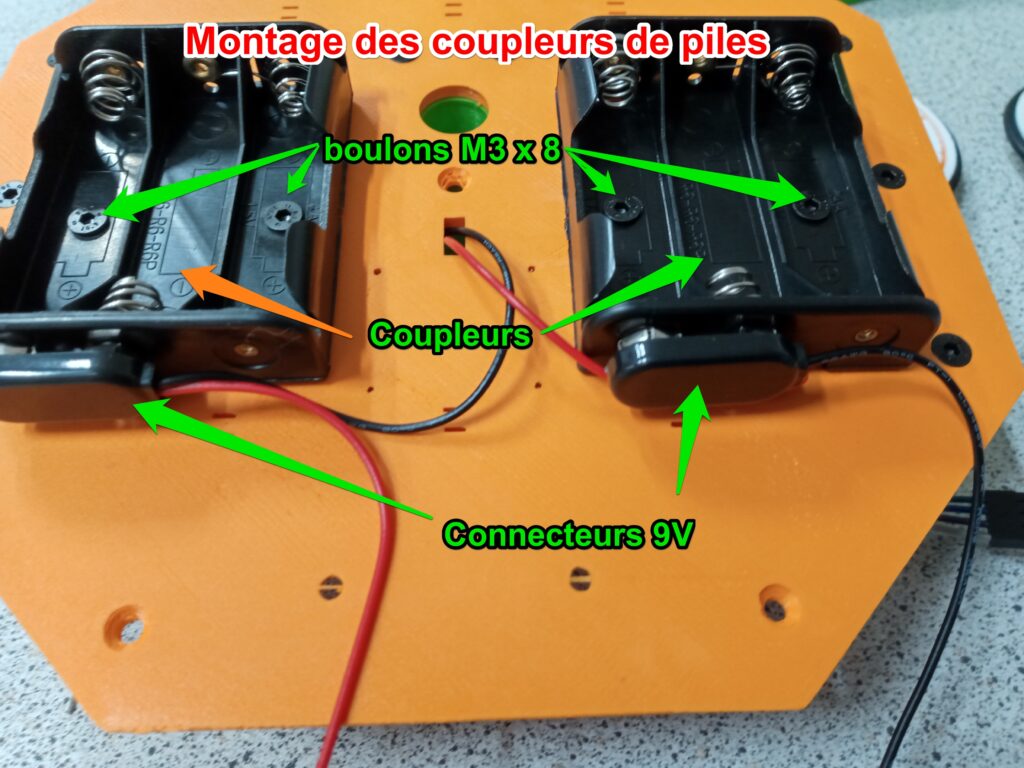
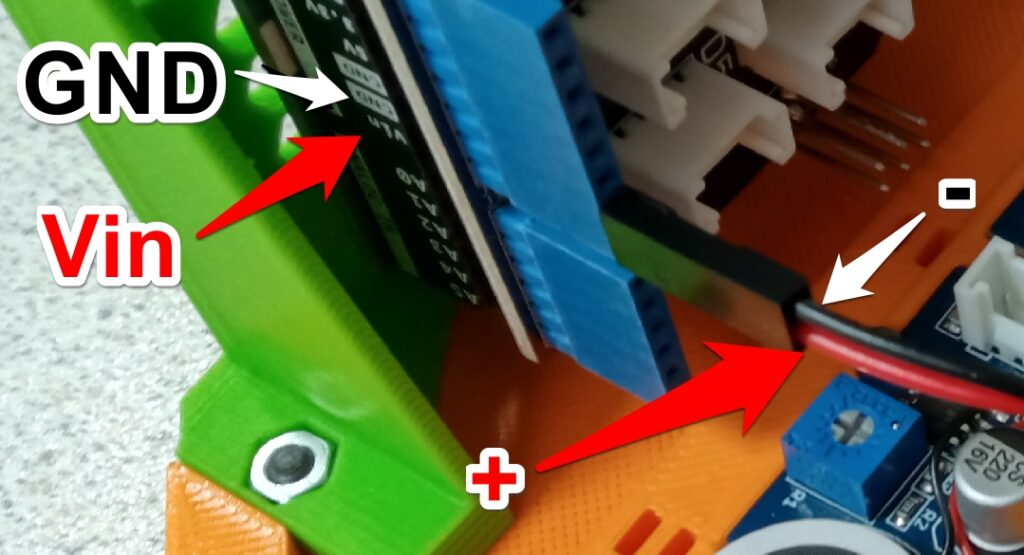
Notre choix s’est donc porté sur des coupleurs équipés de broches 9V. Ils sont montés sur la plateforme de la tortue avec des boulons M3x8mm. Les deux coupleurs devront être couplés ensemble, le – du coupleur de droite sera relié au + du coupleur de gauche (attention, l’orientation retenue est celle de la photo ci-dessous).
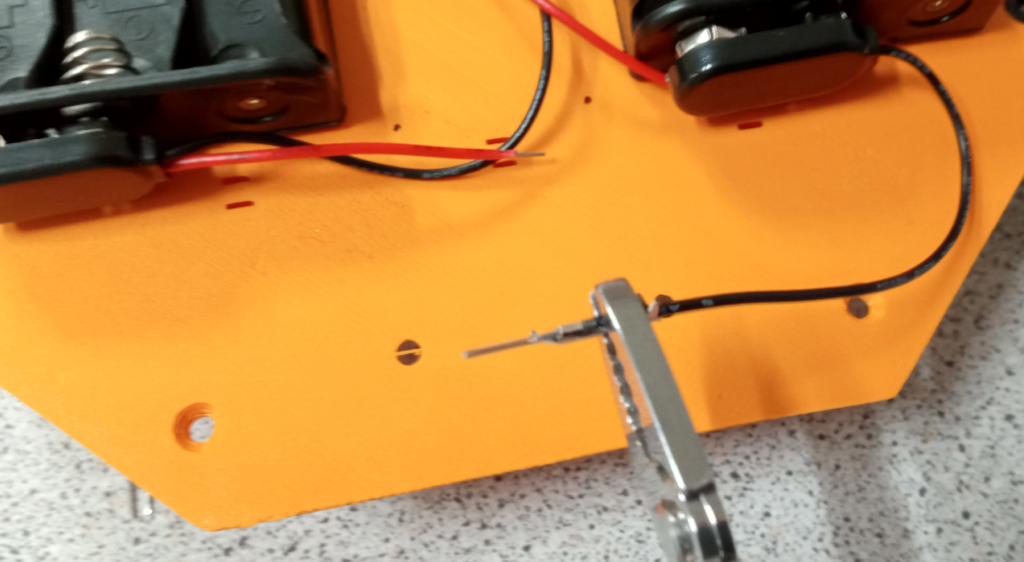
Le montage des contacts se fait par sertissage. J’ai utilisé, pour ce montage, la pince d’un couteau suisse.
Les contacts sertis peuvent être insérés dans les boitiers NSR-01.
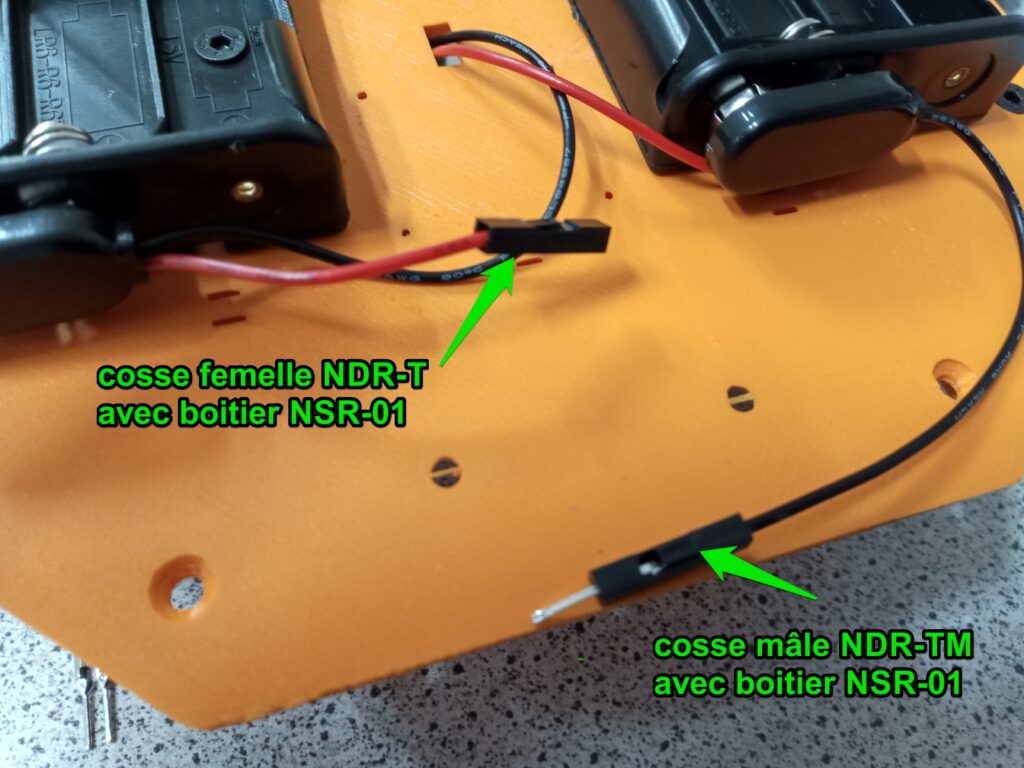
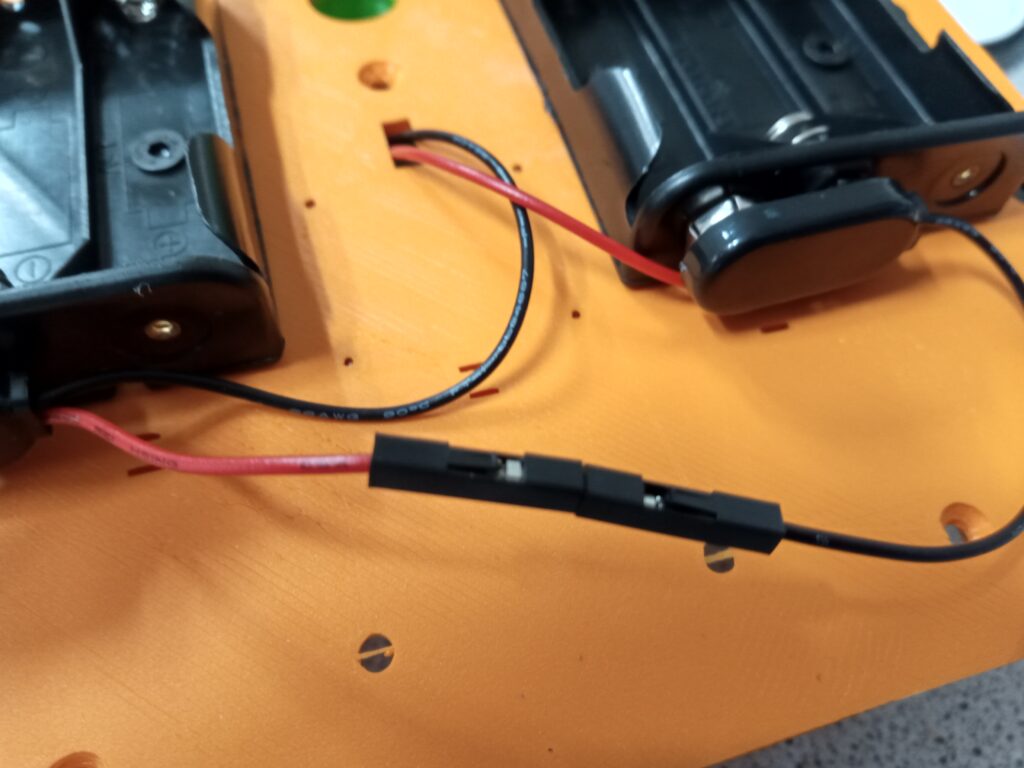
Les contacts mâles et femelles peuvent alors être assemblés mécaniquement.
Les autres extrémités des câbles seront serties de cosses mâles NDR-TM, protégées et assemblées dans un boitier NSR-02. Elles seront montées sur les broches Vin (normalement câble rouge) et GND, (normalement câble noir).
Le câblage des moteurs pas à pas
Le câblage des moteurs pas à pas est vraisemblablement l’opération la plus délicate du montage. Elle ne présente pas de difficultés particulières, mais nécessite d’être très méticuleux. Un mauvais câblage des moteurs les empêchera de fonctionner.
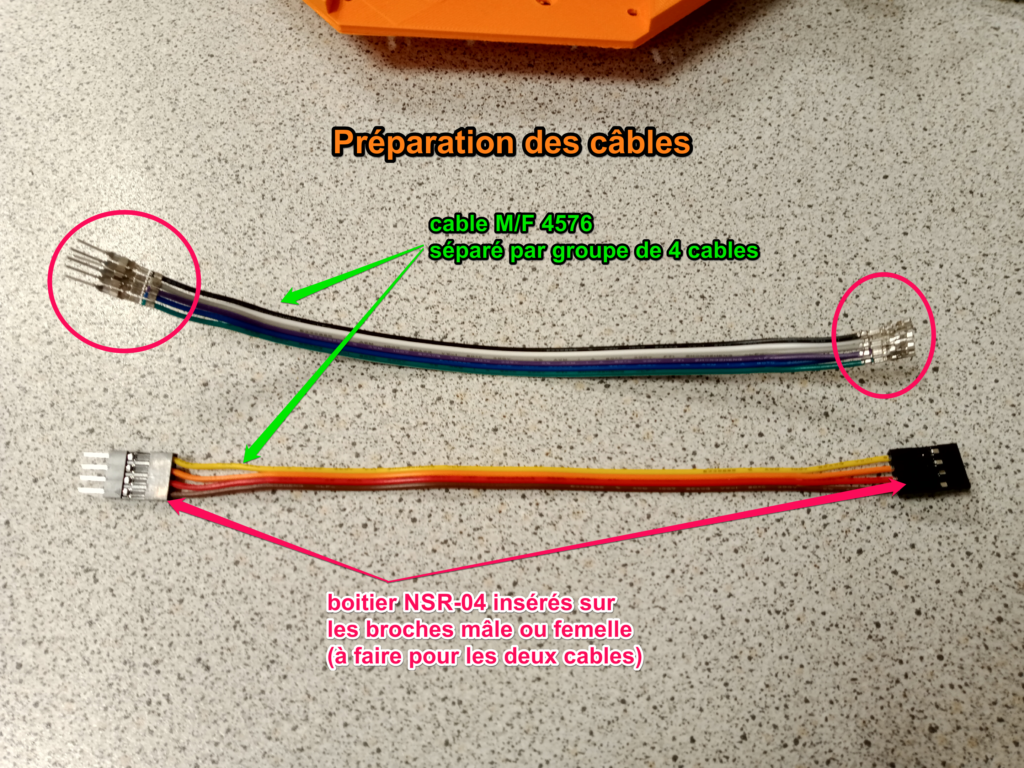
Préparation des câbles
Les câbles sont préparés à partir de l’ensemble des 10 câbles M/F 150 mm 4576. Il sont séparés en deux séries de 4 câbles. Pour les novices, il est préférable de respecter le choix des couleurs retenu sur le tutoriel suivant:
- Câble 1 – vert/bleu/violet/gris
- Câble 2 – brun/rouge/orange/jaune
La première opération consiste à positionner les boitiers NSR-04 sur les broches mâles et femelles de chaque ensemble de câbles.
Câblage des moteurs pas à pas
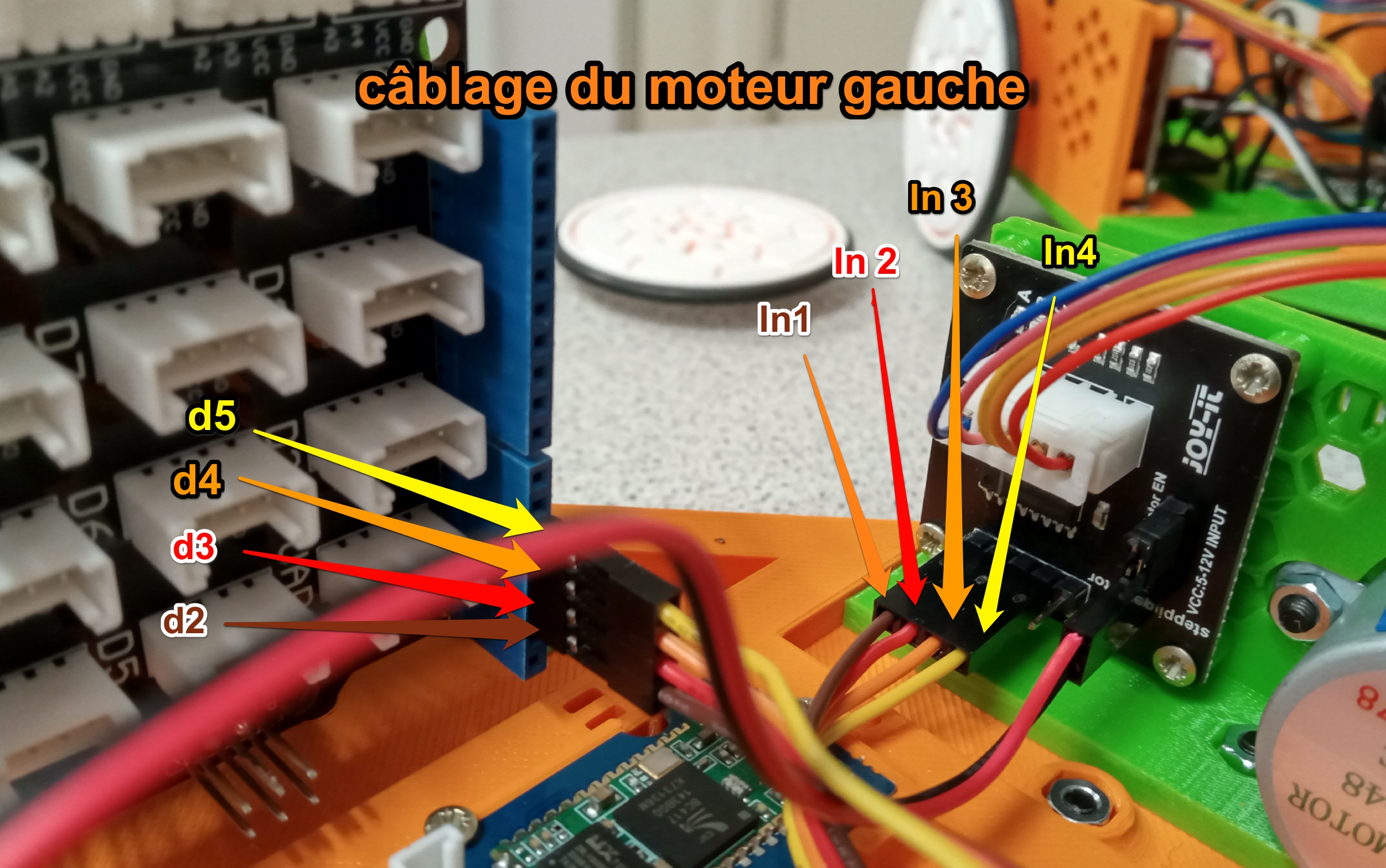
| pour le câblage du moteur gauche, les broches doivent être associées de la façon suivante broche In1 -> broche digitale 2 (ici câble marron) broche In2 -> broche digitale 3 (ici câble rouge) broche In3 -> broche digitale 4 (ici câble orange) broche In4 -> broche digitale 5 (ici câble jaune) |
 |
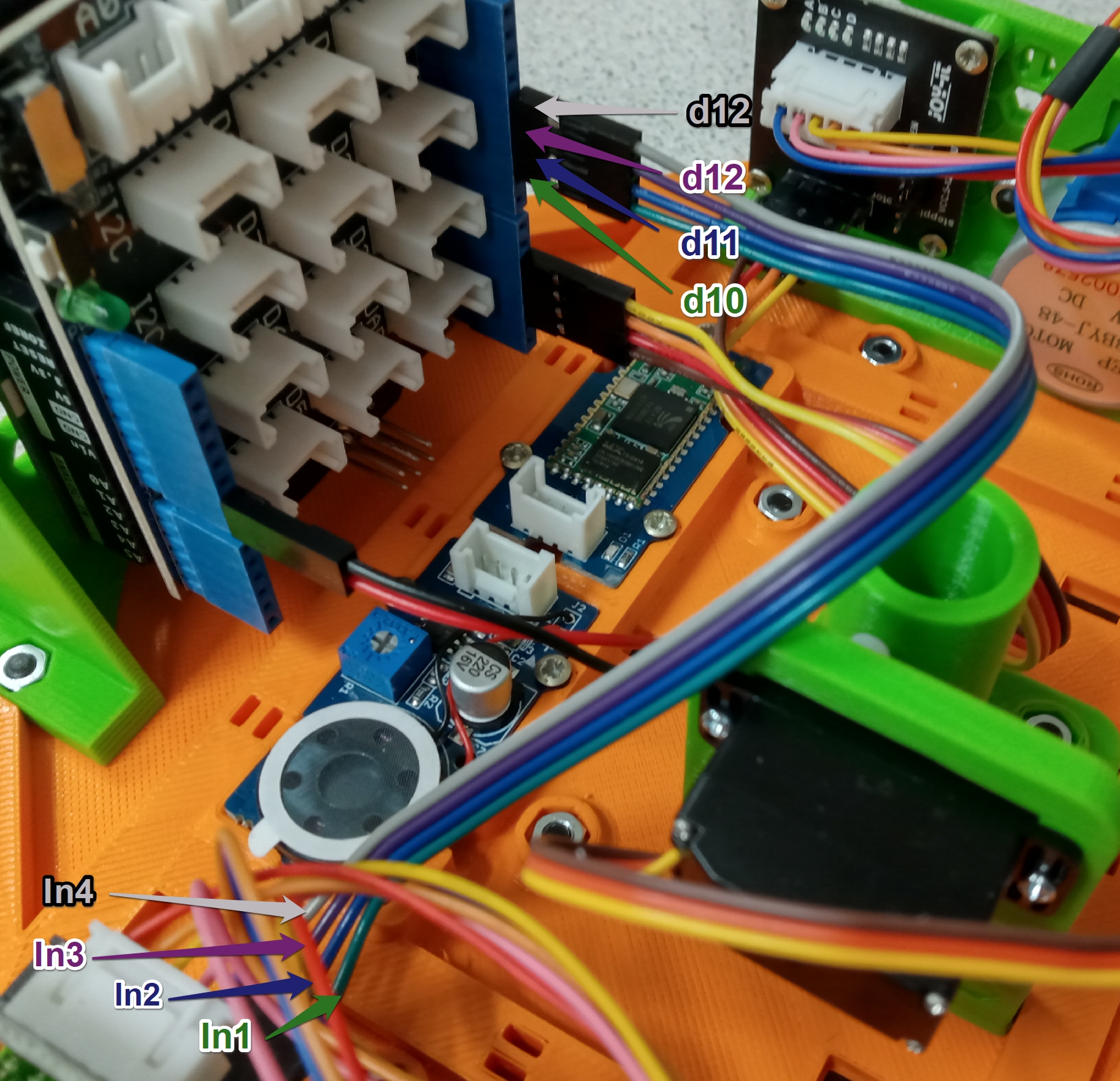
| pour le câblage du moteur droit, les broches doivent être associées de la façon suivante broche In1 -> broche digitale 10 (ici câble vert) broche In2 -> broche digitale 11 (ici câble bleu) broche In3 -> broche digitale 12 (ici câble violet) broche In4 -> broche digitale 13 (ici câble gris |
 |
Les plus aguerris d’entre vous peuvent, bien sûr, changer l’ordre de brochage sur la carte ET dans le programme.
Alimentation des moteurs
Les moteurs pas à pas doivent être alimentés en 5V. Il faut fabriquer un
câble qui permettra l’alimentation des deux moteurs à partir de la
sortie alimentations 5V de la carte. Le câble sera un câble « en Y ». Les 2
connecteurs mâles reliant 4 connecteurs femelles.
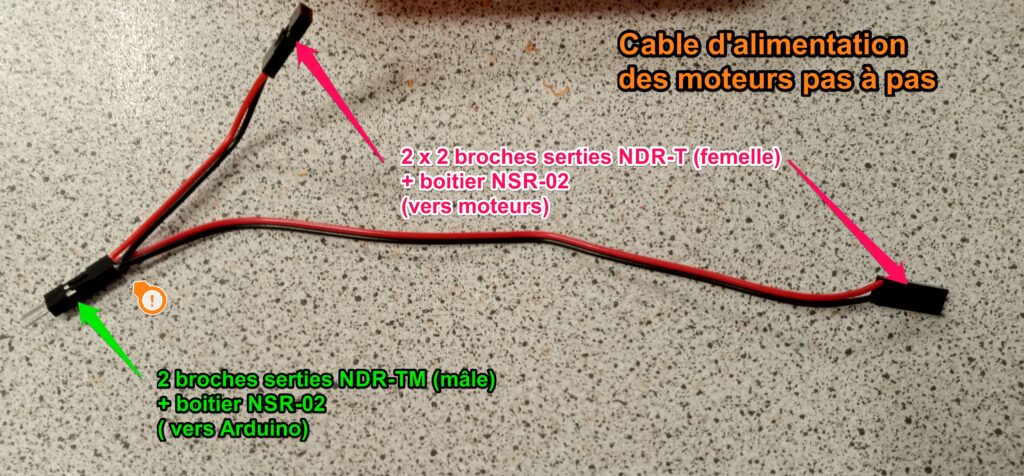
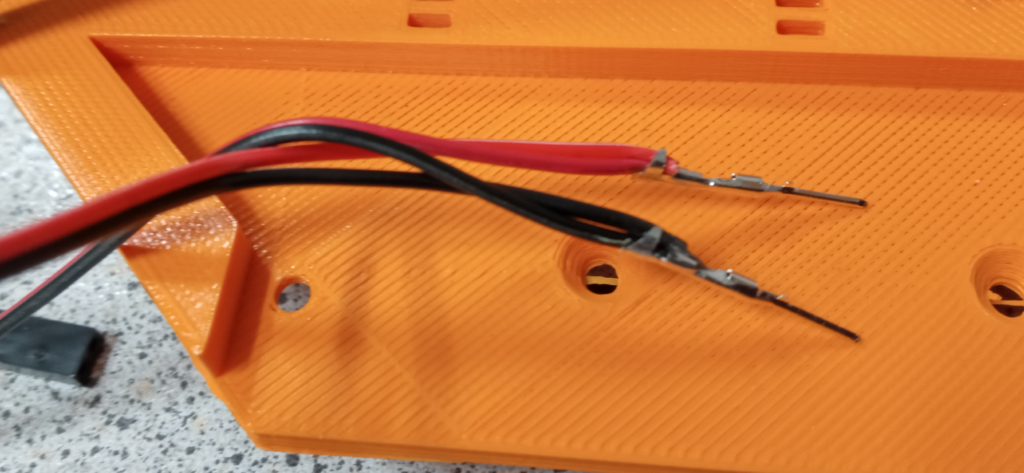
Comme les câbles d’alimentation de la carte Arduino, les connecteurs d’alimentation des moteurs peuvent être sertis avec une petite pince.
ATTENTION: les connecteurs ne sont pas prévus pour le sertissage de deux câbles, vous devrez dénuder les câbles sur toute la longueur du connecteur et le tresser à la main.
L’insertion du boitier NSR-02 peut également être compliquée pour les mêmes raisons. Au départ, n’hésitez pas à donner un peu de longueurs aux câbles pour pouvoir le raccourcir en cas de difficulté.
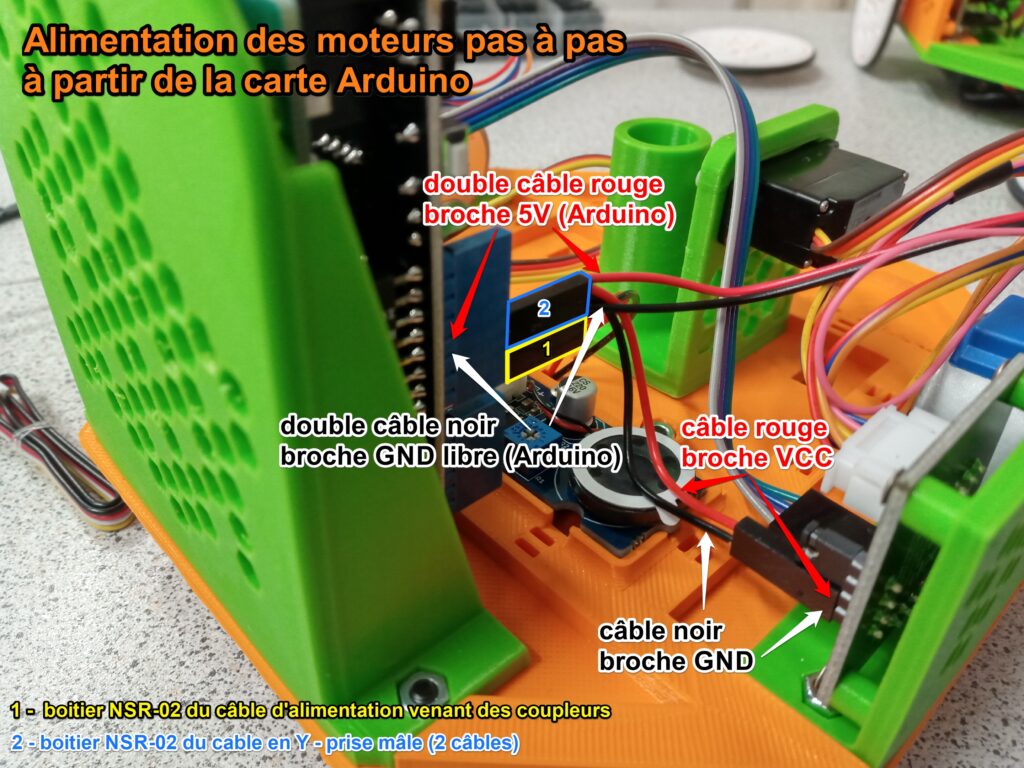
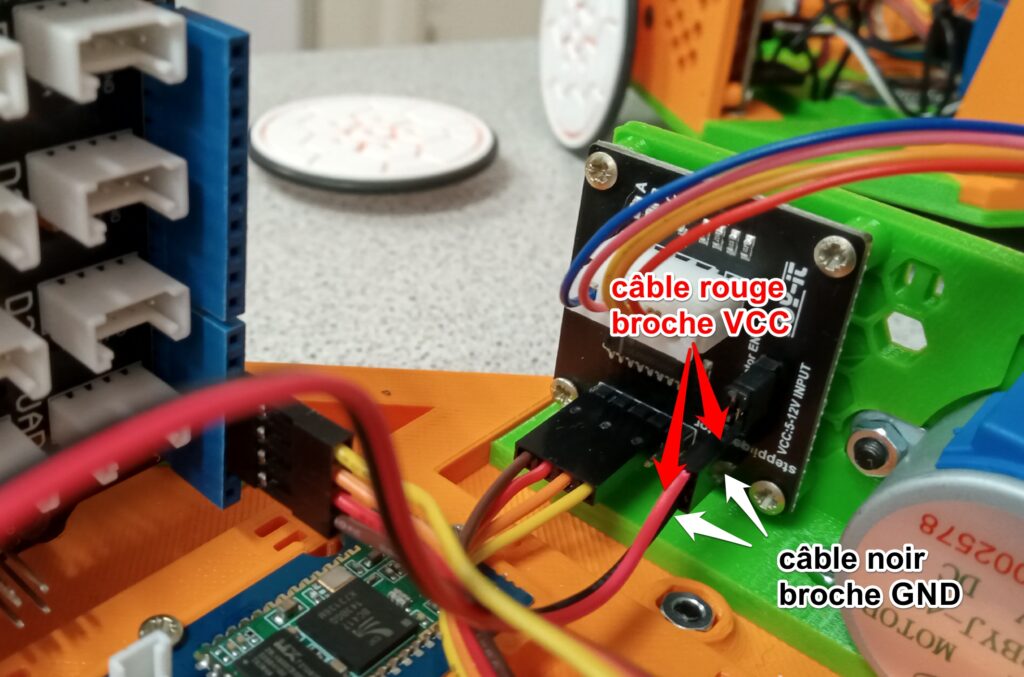
Le câble d’alimentation sera branché de la façon suivante:
Montage des roues
Les roues sont un éléments important de la précision de déplacement du robot. Un montage soigné rendra le robot plus précis et facile à étalonner.
Géométrie des roues et de l’axe moteur
L’axe moteur comporte deux méplats (côté plats) que l’on retrouve dans le logement de la roue imprimée. Pour s’y retrouver plus facilement le méplat est également reproduit ) l’extérieur des logements pour les vis. .
Les vis de réglage de la roue sont des vis M2,5x8mm déposées perpendiculairement les unes aux autres. Il faut installer les écrous dans leurs logements avant d’insérer les vis.
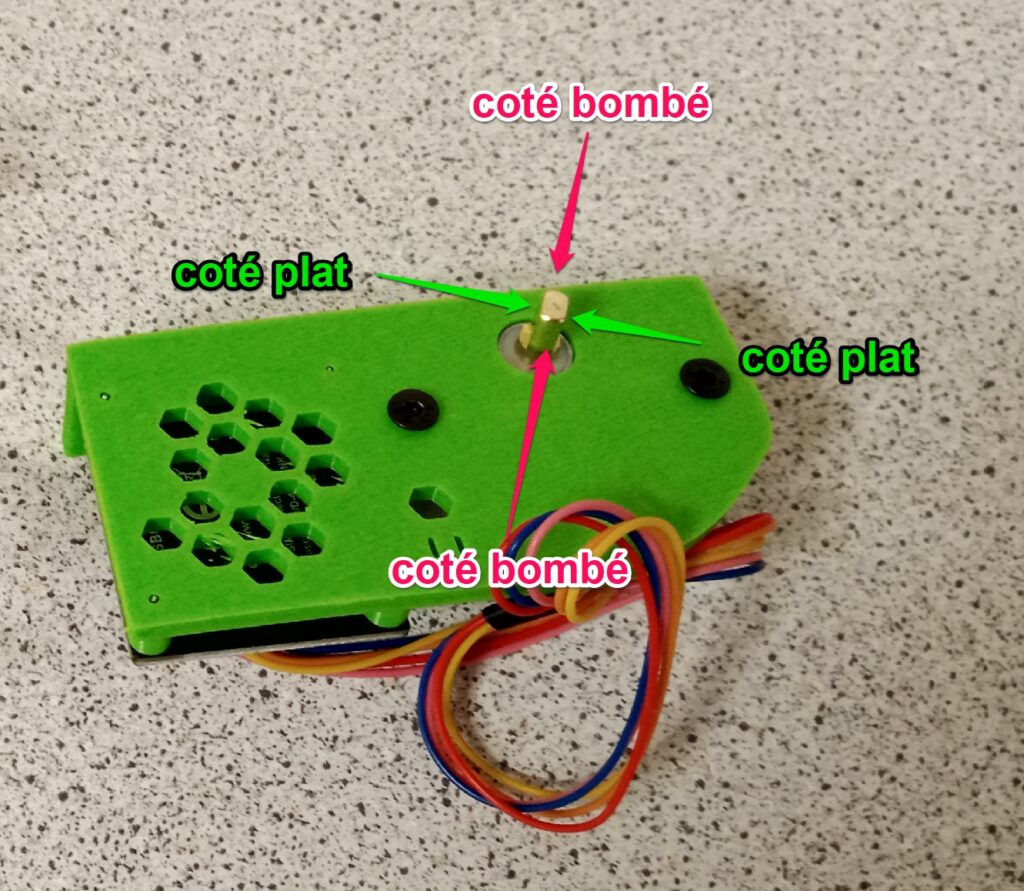
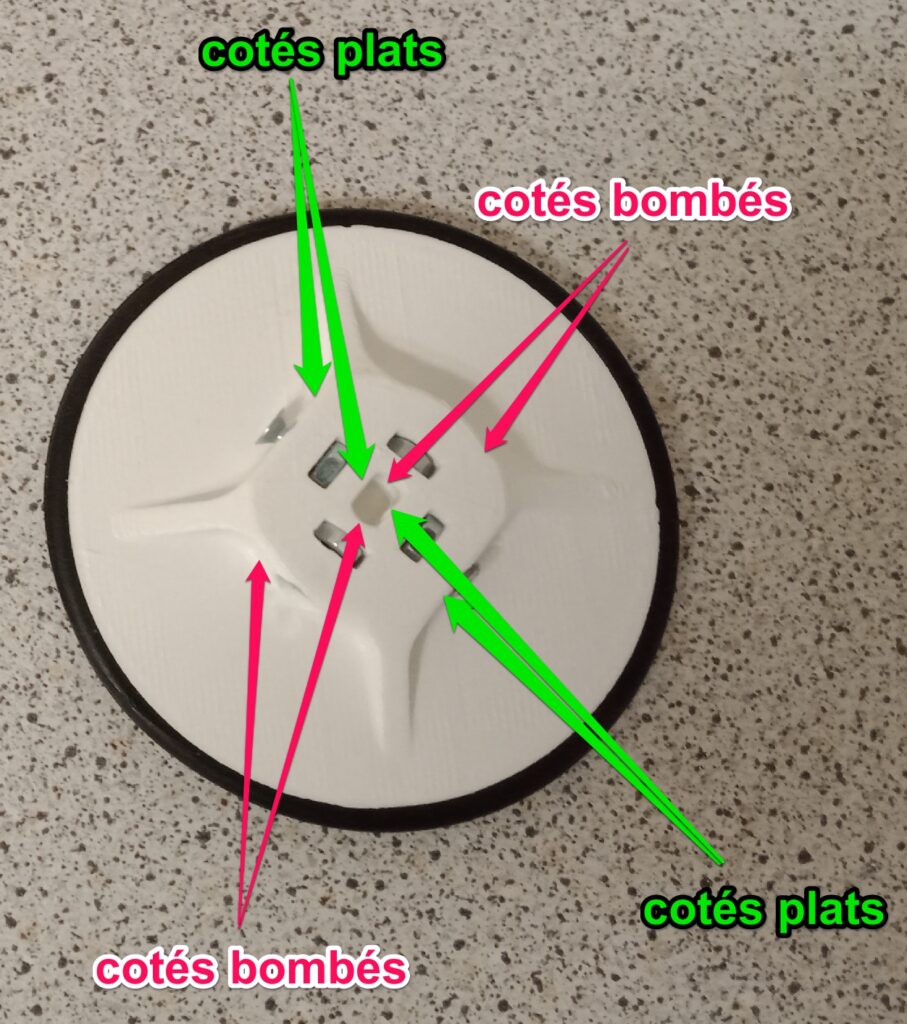
L’ajustement sur le modèle est serré, mais le retrait du PLA peut occasionner un léger jeu. Les 4 vis M2.5 à tête fraisée doivent être montées de façon à ce que la base de la vis affleure dans le logement de l’axe. Afin de faciliter le centrage, les vis coté méplat seront vissées alternativement par 1/2 tour jusqu’à ce que l’axe soit maintenu. Les vis des cotés bombés seront vissées ensuite de la même façon alternative.
Les câblages Grove SEEED
Les composants Grove SEEED sont connectés au shield de la façon suivante:
| Module grove | Emplacement sur le shield grove |
|---|---|
| Module Bluetooth Grove 113020008 | UART |
| Module HP Grove 107020001 | D8 |
| Servomoteur Grove 316010005 | D7 |
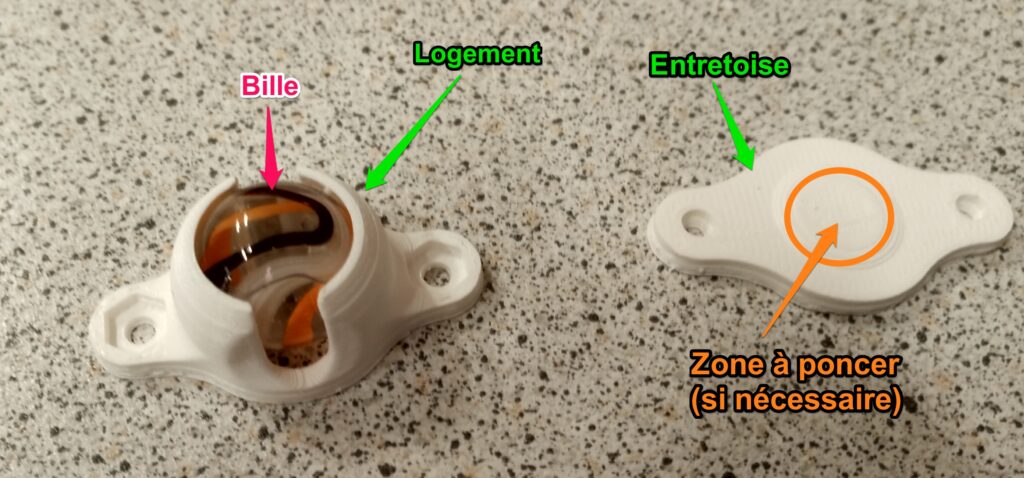
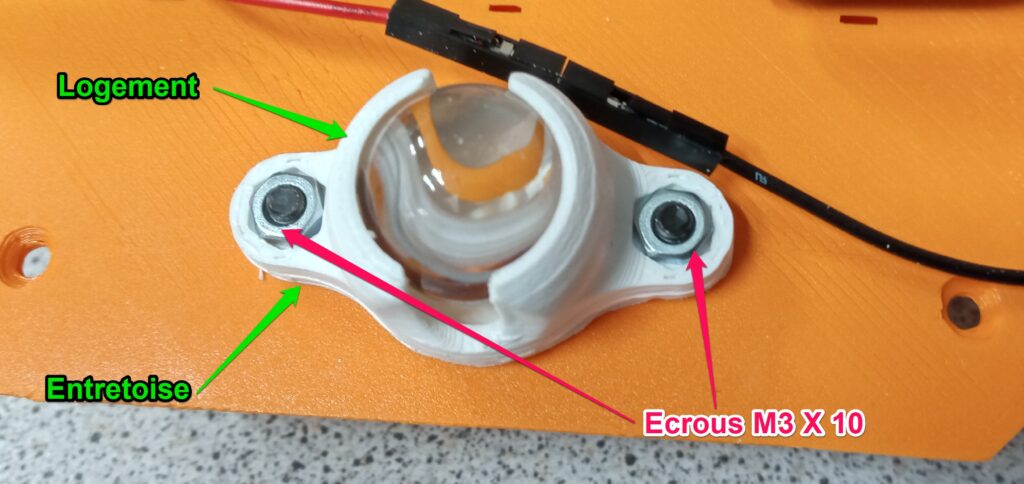
La roue libre
La roue libre est une bille standard qui est montée entre un logement et une entretoise. Il est nécessaire d’ajuster la hauteur de la partie bombée de l’entretoise par un ponçage léger de faon à ce que la bille bouge librement une fois l’ensemble monté.
Bravo…
Si vous avez réussi à monter le robot jusqu’ici, il sera bientôt fonctionnel. Il suffira juste de téléverser le programme. Mais ceci sera l’objet d’un autre billet.